Ray tracing in Mojo
This tutorial about ray tracing is based on the popular tutorial Understandable RayTracing in C++. The mathematical explanations are well described in that tutorial, so we'll just point you to the appropriate sections for reference as we implement a basic ray tracer in Mojo.
Step 1: Basic definitions
We'll start by defining a Vec3f struct, which will use to represent a vector
in 3D space as well as RGB pixels. We'll use a SIMD representation for our
vector to enable vectorized operations. The SIMD type is a fixed-size vector,
and its size must be a power of 2. So we'll use a size of 4 and always pad the
underlying storage with a 0.
from math import isqrt
@register_passable("trivial")
struct Vec3f:
var data: SIMD[DType.float32, 4]
@always_inline
fn __init__(out self, x: Float32, y: Float32, z: Float32):
self.data = SIMD[DType.float32, 4](x, y, z, 0)
@implicit
@always_inline
fn __init__(out self, data: SIMD[DType.float32, 4]):
self.data = data
@always_inline
@staticmethod
fn zero() -> Vec3f:
return Vec3f(0, 0, 0)
@always_inline
fn __sub__(self, other: Vec3f) -> Vec3f:
return self.data - other.data
@always_inline
fn __add__(self, other: Vec3f) -> Vec3f:
return self.data + other.data
@always_inline
fn __matmul__(self, other: Vec3f) -> Float32:
return (self.data * other.data).reduce_add()
@always_inline
fn __mul__(self, k: Float32) -> Vec3f:
return self.data * k
@always_inline
fn __neg__(self) -> Vec3f:
return self.data * -1.0
@always_inline
fn __getitem__(self, idx: Int) -> SIMD[DType.float32, 1]:
return self.data[idx]
@always_inline
fn cross(self, other: Vec3f) -> Vec3f:
var self_zxy = self.data.shuffle[2, 0, 1, 3]()
var other_zxy = other.data.shuffle[2, 0, 1, 3]()
return (self_zxy * other.data - self.data * other_zxy).shuffle[
2, 0, 1, 3
]()
@always_inline
fn normalize(self) -> Vec3f:
return self.data * isqrt(self @ self)
from math import isqrt
@register_passable("trivial")
struct Vec3f:
var data: SIMD[DType.float32, 4]
@always_inline
fn __init__(out self, x: Float32, y: Float32, z: Float32):
self.data = SIMD[DType.float32, 4](x, y, z, 0)
@implicit
@always_inline
fn __init__(out self, data: SIMD[DType.float32, 4]):
self.data = data
@always_inline
@staticmethod
fn zero() -> Vec3f:
return Vec3f(0, 0, 0)
@always_inline
fn __sub__(self, other: Vec3f) -> Vec3f:
return self.data - other.data
@always_inline
fn __add__(self, other: Vec3f) -> Vec3f:
return self.data + other.data
@always_inline
fn __matmul__(self, other: Vec3f) -> Float32:
return (self.data * other.data).reduce_add()
@always_inline
fn __mul__(self, k: Float32) -> Vec3f:
return self.data * k
@always_inline
fn __neg__(self) -> Vec3f:
return self.data * -1.0
@always_inline
fn __getitem__(self, idx: Int) -> SIMD[DType.float32, 1]:
return self.data[idx]
@always_inline
fn cross(self, other: Vec3f) -> Vec3f:
var self_zxy = self.data.shuffle[2, 0, 1, 3]()
var other_zxy = other.data.shuffle[2, 0, 1, 3]()
return (self_zxy * other.data - self.data * other_zxy).shuffle[
2, 0, 1, 3
]()
@always_inline
fn normalize(self) -> Vec3f:
return self.data * isqrt(self @ self)
We now define our Image struct, which will store the RGB pixels of our
images. It also contains a method to convert this Mojo struct into a NumPy
image, which will be used for implementing a straightforward display
mechanism. We will also implement a function for loading PNG files from disk.
First install the required libraries:
%%python
from importlib.util import find_spec
import shutil
import subprocess
fix = """
-------------------------------------------------------------------------
fix following the steps here:
https://github.com/modularml/mojo/issues/1085#issuecomment-1771403719
-------------------------------------------------------------------------
"""
def install_if_missing(name: str):
if find_spec(name):
return
print(f"{name} not found, installing...")
try:
if shutil.which('python3'): python = "python3"
elif shutil.which('python'): python = "python"
else: raise ("python not on path" + fix)
subprocess.check_call([python, "-m", "pip", "install", name])
except:
raise ImportError(f"{name} not found" + fix)
install_if_missing("numpy")
install_if_missing("matplotlib")
%%python
from importlib.util import find_spec
import shutil
import subprocess
fix = """
-------------------------------------------------------------------------
fix following the steps here:
https://github.com/modularml/mojo/issues/1085#issuecomment-1771403719
-------------------------------------------------------------------------
"""
def install_if_missing(name: str):
if find_spec(name):
return
print(f"{name} not found, installing...")
try:
if shutil.which('python3'): python = "python3"
elif shutil.which('python'): python = "python"
else: raise ("python not on path" + fix)
subprocess.check_call([python, "-m", "pip", "install", name])
except:
raise ImportError(f"{name} not found" + fix)
install_if_missing("numpy")
install_if_missing("matplotlib")
from python import Python
from python import PythonObject
from memory import UnsafePointer
struct Image:
# reference count used to make the object efficiently copyable
var rc: UnsafePointer[Int]
# the two dimensional image is represented as a flat array
var pixels: UnsafePointer[Vec3f]
var height: Int
var width: Int
fn __init__(out self, height: Int, width: Int):
self.height = height
self.width = width
self.pixels = UnsafePointer[Vec3f].alloc(self.height * self.width)
self.rc = UnsafePointer[Int].alloc(1)
self.rc[] = 1
fn __copyinit__(out self, other: Self):
other._inc_rc()
self.pixels = other.pixels
self.rc = other.rc
self.height = other.height
self.width = other.width
fn __del__(owned self):
self._dec_rc()
fn _dec_rc(self):
if self.rc[] > 1:
self.rc[] -= 1
return
self._free()
fn _inc_rc(self):
self.rc[] += 1
fn _free(self):
self.rc.free()
self.pixels.free()
@always_inline
fn set(self, row: Int, col: Int, value: Vec3f) -> None:
self.pixels[self._pos_to_index(row, col)] = value
@always_inline
fn _pos_to_index(self, row: Int, col: Int) -> Int:
# Convert a (rol, col) position into an index in the underlying linear storage
return row * self.width + col
def to_numpy_image(self) -> PythonObject:
var np = Python.import_module("numpy")
var plt = Python.import_module("matplotlib.pyplot")
var np_image = np.zeros((self.height, self.width, 3), np.float32)
# We use raw pointers to efficiently copy the pixels to the numpy array
var out_pointer = np_image.__array_interface__["data"][0].unsafe_get_as_pointer[DType.float32]()
var in_pointer = self.pixels.bitcast[Float32]()
for row in range(self.height):
for col in range(self.width):
var index = self._pos_to_index(row, col)
for dim in range(3):
out_pointer[index * 3 + dim] = in_pointer[index * 4 + dim]
return np_image
def load_image(fname: String) -> Image:
var np = Python.import_module("numpy")
var plt = Python.import_module("matplotlib.pyplot")
var np_image = plt.imread(fname)
var rows = Int(np_image.shape[0])
var cols = Int(np_image.shape[1])
var image = Image(rows, cols)
var in_pointer = np_image.__array_interface__["data"][0].unsafe_get_as_pointer[DType.float32]()
var out_pointer = image.pixels.bitcast[Float32]()
for row in range(rows):
for col in range(cols):
var index = image._pos_to_index(row, col)
for dim in range(3):
out_pointer[index * 4 + dim] = in_pointer[index * 3 + dim]
return image
from python import Python
from python import PythonObject
from memory import UnsafePointer
struct Image:
# reference count used to make the object efficiently copyable
var rc: UnsafePointer[Int]
# the two dimensional image is represented as a flat array
var pixels: UnsafePointer[Vec3f]
var height: Int
var width: Int
fn __init__(out self, height: Int, width: Int):
self.height = height
self.width = width
self.pixels = UnsafePointer[Vec3f].alloc(self.height * self.width)
self.rc = UnsafePointer[Int].alloc(1)
self.rc[] = 1
fn __copyinit__(out self, other: Self):
other._inc_rc()
self.pixels = other.pixels
self.rc = other.rc
self.height = other.height
self.width = other.width
fn __del__(owned self):
self._dec_rc()
fn _dec_rc(self):
if self.rc[] > 1:
self.rc[] -= 1
return
self._free()
fn _inc_rc(self):
self.rc[] += 1
fn _free(self):
self.rc.free()
self.pixels.free()
@always_inline
fn set(self, row: Int, col: Int, value: Vec3f) -> None:
self.pixels[self._pos_to_index(row, col)] = value
@always_inline
fn _pos_to_index(self, row: Int, col: Int) -> Int:
# Convert a (rol, col) position into an index in the underlying linear storage
return row * self.width + col
def to_numpy_image(self) -> PythonObject:
var np = Python.import_module("numpy")
var plt = Python.import_module("matplotlib.pyplot")
var np_image = np.zeros((self.height, self.width, 3), np.float32)
# We use raw pointers to efficiently copy the pixels to the numpy array
var out_pointer = np_image.__array_interface__["data"][0].unsafe_get_as_pointer[DType.float32]()
var in_pointer = self.pixels.bitcast[Float32]()
for row in range(self.height):
for col in range(self.width):
var index = self._pos_to_index(row, col)
for dim in range(3):
out_pointer[index * 3 + dim] = in_pointer[index * 4 + dim]
return np_image
def load_image(fname: String) -> Image:
var np = Python.import_module("numpy")
var plt = Python.import_module("matplotlib.pyplot")
var np_image = plt.imread(fname)
var rows = Int(np_image.shape[0])
var cols = Int(np_image.shape[1])
var image = Image(rows, cols)
var in_pointer = np_image.__array_interface__["data"][0].unsafe_get_as_pointer[DType.float32]()
var out_pointer = image.pixels.bitcast[Float32]()
for row in range(rows):
for col in range(cols):
var index = image._pos_to_index(row, col)
for dim in range(3):
out_pointer[index * 4 + dim] = in_pointer[index * 3 + dim]
return image
We then add a function for quickly displaying an Image into the notebook. Our
Python interop comes in quite handy.
def render(image: Image):
np = Python.import_module("numpy")
plt = Python.import_module("matplotlib.pyplot")
colors = Python.import_module("matplotlib.colors")
dpi = 32
fig = plt.figure(1, [image.width // 10, image.height // 10], dpi)
plt.imshow(image.to_numpy_image())
plt.axis("off")
plt.show()
def render(image: Image):
np = Python.import_module("numpy")
plt = Python.import_module("matplotlib.pyplot")
colors = Python.import_module("matplotlib.colors")
dpi = 32
fig = plt.figure(1, [image.width // 10, image.height // 10], dpi)
plt.imshow(image.to_numpy_image())
plt.axis("off")
plt.show()
Finally, we test all our code so far with a simple image, which is the one rendered in the Step 1 of the C++ tutorial.
var image = Image(192, 256)
for row in range(image.height):
for col in range(image.width):
image.set(
row,
col,
Vec3f(Float32(row) / image.height, Float32(col) / image.width, 0),
)
render(image)
var image = Image(192, 256)
for row in range(image.height):
for col in range(image.width):
image.set(
row,
col,
Vec3f(Float32(row) / image.height, Float32(col) / image.width, 0),
)
render(image)

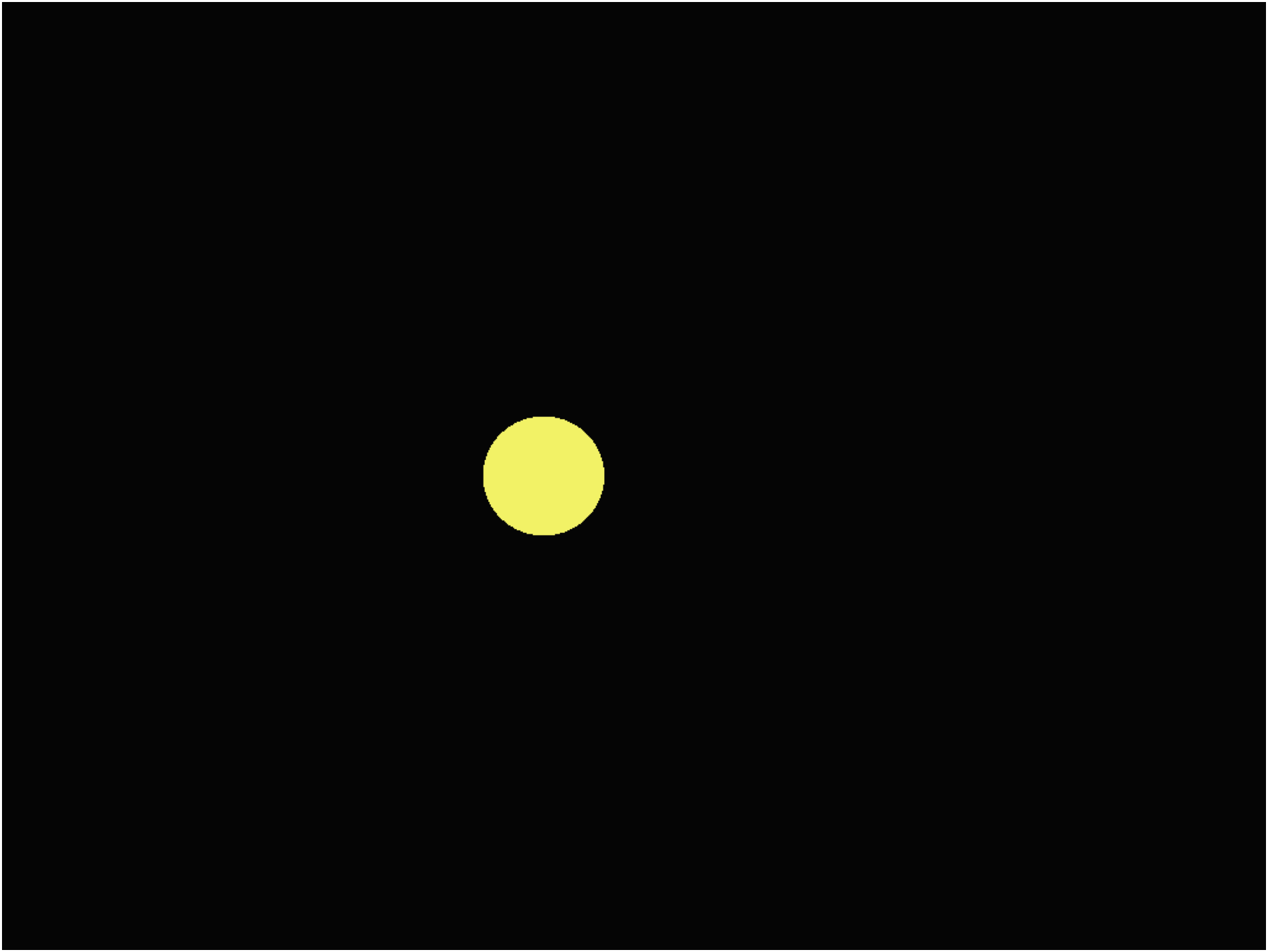
Step 2: Ray tracing
Now we'll perform ray tracing from a camera into a scene with a sphere. Before reading the code below, we suggest you read more about how this works conceptually from Step 2 of the C++ tutorial.
We first define the Material and Sphere structs, which are the new data
structures we'll need.
from math import sqrt
@register_passable("trivial")
struct Material:
var color: Vec3f
var albedo: Vec3f
var specular_component: Float32
@implicit
fn __init__(out self, color: Vec3f, albedo: Vec3f = Vec3f(0, 0, 0),
specular_component: Float32 = 0):
self.color = color
self.albedo = albedo
self.specular_component = specular_component
alias W = 1024
alias H = 768
alias bg_color = Vec3f(0.02, 0.02, 0.02)
var shiny_yellow = Material(Vec3f(0.95, 0.95, 0.4), Vec3f(0.7, 0.6, 0), 30.0)
var green_rubber = Material(Vec3f( 0.3, 0.7, 0.3), Vec3f(0.9, 0.1, 0), 1.0)
@value
@register_passable("trivial")
struct Sphere(CollectionElement):
var center: Vec3f
var radius: Float32
var material: Material
@always_inline
fn intersects(self, orig: Vec3f, dir: Vec3f, mut dist: Float32) -> Bool:
"""This method returns True if a given ray intersects this sphere.
And if it does, it writes in the `dist` parameter the distance to the
origin of the ray.
"""
var L = orig - self.center
var a = dir @ dir
var b = 2 * (dir @ L)
var c = L @ L - self.radius * self.radius
var discriminant = b * b - 4 * a * c
if discriminant < 0:
return False
if discriminant == 0:
dist = -b / 2 * a
return True
var q = -0.5 * (b + sqrt(discriminant)) if b > 0 else -0.5 * (
b - sqrt(discriminant)
)
var t0 = q / a
var t1 = c / q
if t0 > t1:
t0 = t1
if t0 < 0:
t0 = t1
if t0 < 0:
return False
dist = t0
return True
from math import sqrt
@register_passable("trivial")
struct Material:
var color: Vec3f
var albedo: Vec3f
var specular_component: Float32
@implicit
fn __init__(out self, color: Vec3f, albedo: Vec3f = Vec3f(0, 0, 0),
specular_component: Float32 = 0):
self.color = color
self.albedo = albedo
self.specular_component = specular_component
alias W = 1024
alias H = 768
alias bg_color = Vec3f(0.02, 0.02, 0.02)
var shiny_yellow = Material(Vec3f(0.95, 0.95, 0.4), Vec3f(0.7, 0.6, 0), 30.0)
var green_rubber = Material(Vec3f( 0.3, 0.7, 0.3), Vec3f(0.9, 0.1, 0), 1.0)
@value
@register_passable("trivial")
struct Sphere(CollectionElement):
var center: Vec3f
var radius: Float32
var material: Material
@always_inline
fn intersects(self, orig: Vec3f, dir: Vec3f, mut dist: Float32) -> Bool:
"""This method returns True if a given ray intersects this sphere.
And if it does, it writes in the `dist` parameter the distance to the
origin of the ray.
"""
var L = orig - self.center
var a = dir @ dir
var b = 2 * (dir @ L)
var c = L @ L - self.radius * self.radius
var discriminant = b * b - 4 * a * c
if discriminant < 0:
return False
if discriminant == 0:
dist = -b / 2 * a
return True
var q = -0.5 * (b + sqrt(discriminant)) if b > 0 else -0.5 * (
b - sqrt(discriminant)
)
var t0 = q / a
var t1 = c / q
if t0 > t1:
t0 = t1
if t0 < 0:
t0 = t1
if t0 < 0:
return False
dist = t0
return True
We then define a cast_ray method, which will be used to figure out the color
of a particular pixel in the image we'll produce. It basically works by
identifying whether this ray intersects the sphere or not.
fn cast_ray(orig: Vec3f, dir: Vec3f, sphere: Sphere) -> Vec3f:
var dist: Float32 = 0
if not sphere.intersects(orig, dir, dist):
return bg_color
return sphere.material.color
fn cast_ray(orig: Vec3f, dir: Vec3f, sphere: Sphere) -> Vec3f:
var dist: Float32 = 0
if not sphere.intersects(orig, dir, dist):
return bg_color
return sphere.material.color
Lastly, we parallelize the ray tracing for every pixel row-wise.
from math import tan, acos
from algorithm import parallelize
fn create_image_with_sphere(sphere: Sphere, height: Int, width: Int) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(row, col, cast_ray(Vec3f.zero(), dir, sphere))
parallelize[_process_row](height)
return image
render(
create_image_with_sphere(Sphere(Vec3f(-3, 0, -16), 2, shiny_yellow), H, W)
)
from math import tan, acos
from algorithm import parallelize
fn create_image_with_sphere(sphere: Sphere, height: Int, width: Int) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(row, col, cast_ray(Vec3f.zero(), dir, sphere))
parallelize[_process_row](height)
return image
render(
create_image_with_sphere(Sphere(Vec3f(-3, 0, -16), 2, shiny_yellow), H, W)
)
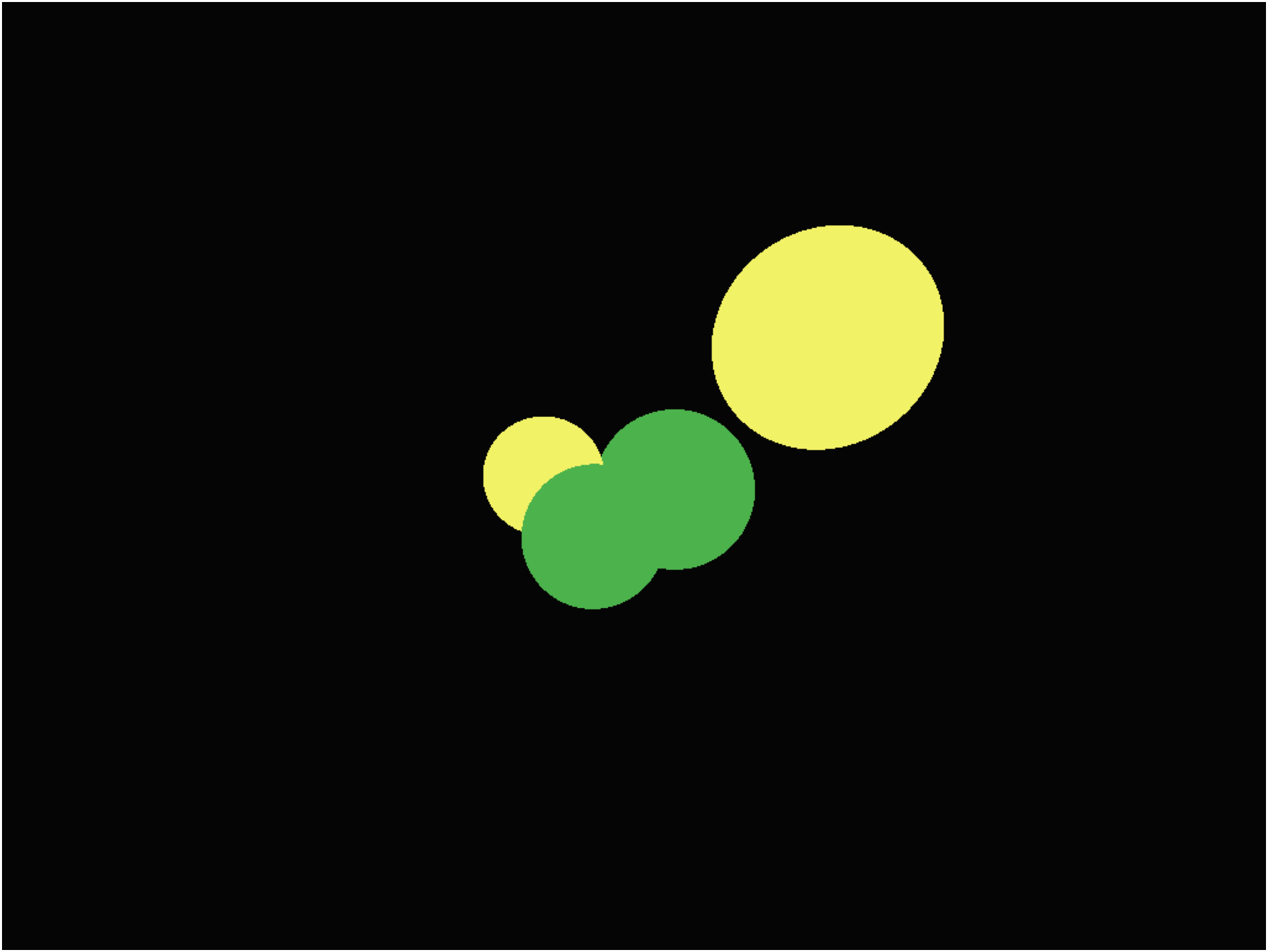
Step 3: More spheres
This section corresponds to the Step 3 of the C++ tutorial.
We include here all the necessary changes:
- We add 3 more spheres to the scene, 2 of them being of green rubber material.
- When we intersect the ray with the sphere, we render the color of the closest sphere.
from algorithm import parallelize
from utils.numerics import inf
from collections import List
fn scene_intersect(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
background: Material,
) -> Material:
var spheres_dist = inf[DType.float32]()
var material = background
for i in range(spheres.size):
var dist = inf[DType.float32]()
if spheres[i].intersects(orig, dir, dist) and dist < spheres_dist:
spheres_dist = dist
material = spheres[i].material
return material
fn cast_ray(
orig: Vec3f, dir: Vec3f, spheres: List[Sphere]
) -> Material:
var background = Material(Vec3f(0.02, 0.02, 0.02))
return scene_intersect(orig, dir, spheres, background)
fn create_image_with_spheres(
spheres: List[Sphere], height: Int, width: Int
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(row, col, cast_ray(Vec3f.zero(), dir, spheres).color)
parallelize[_process_row](height)
return image
var spheres = List[Sphere]()
spheres.append(Sphere(Vec3f(-3, 0, -16), 2, shiny_yellow))
spheres.append(Sphere(Vec3f(-1.0, -1.5, -12), 1.8, green_rubber))
spheres.append(Sphere(Vec3f( 1.5, -0.5, -18), 3, green_rubber))
spheres.append(Sphere(Vec3f( 7, 5, -18), 4, shiny_yellow))
render(create_image_with_spheres(spheres, H, W))
from algorithm import parallelize
from utils.numerics import inf
from collections import List
fn scene_intersect(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
background: Material,
) -> Material:
var spheres_dist = inf[DType.float32]()
var material = background
for i in range(spheres.size):
var dist = inf[DType.float32]()
if spheres[i].intersects(orig, dir, dist) and dist < spheres_dist:
spheres_dist = dist
material = spheres[i].material
return material
fn cast_ray(
orig: Vec3f, dir: Vec3f, spheres: List[Sphere]
) -> Material:
var background = Material(Vec3f(0.02, 0.02, 0.02))
return scene_intersect(orig, dir, spheres, background)
fn create_image_with_spheres(
spheres: List[Sphere], height: Int, width: Int
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(row, col, cast_ray(Vec3f.zero(), dir, spheres).color)
parallelize[_process_row](height)
return image
var spheres = List[Sphere]()
spheres.append(Sphere(Vec3f(-3, 0, -16), 2, shiny_yellow))
spheres.append(Sphere(Vec3f(-1.0, -1.5, -12), 1.8, green_rubber))
spheres.append(Sphere(Vec3f( 1.5, -0.5, -18), 3, green_rubber))
spheres.append(Sphere(Vec3f( 7, 5, -18), 4, shiny_yellow))
render(create_image_with_spheres(spheres, H, W))
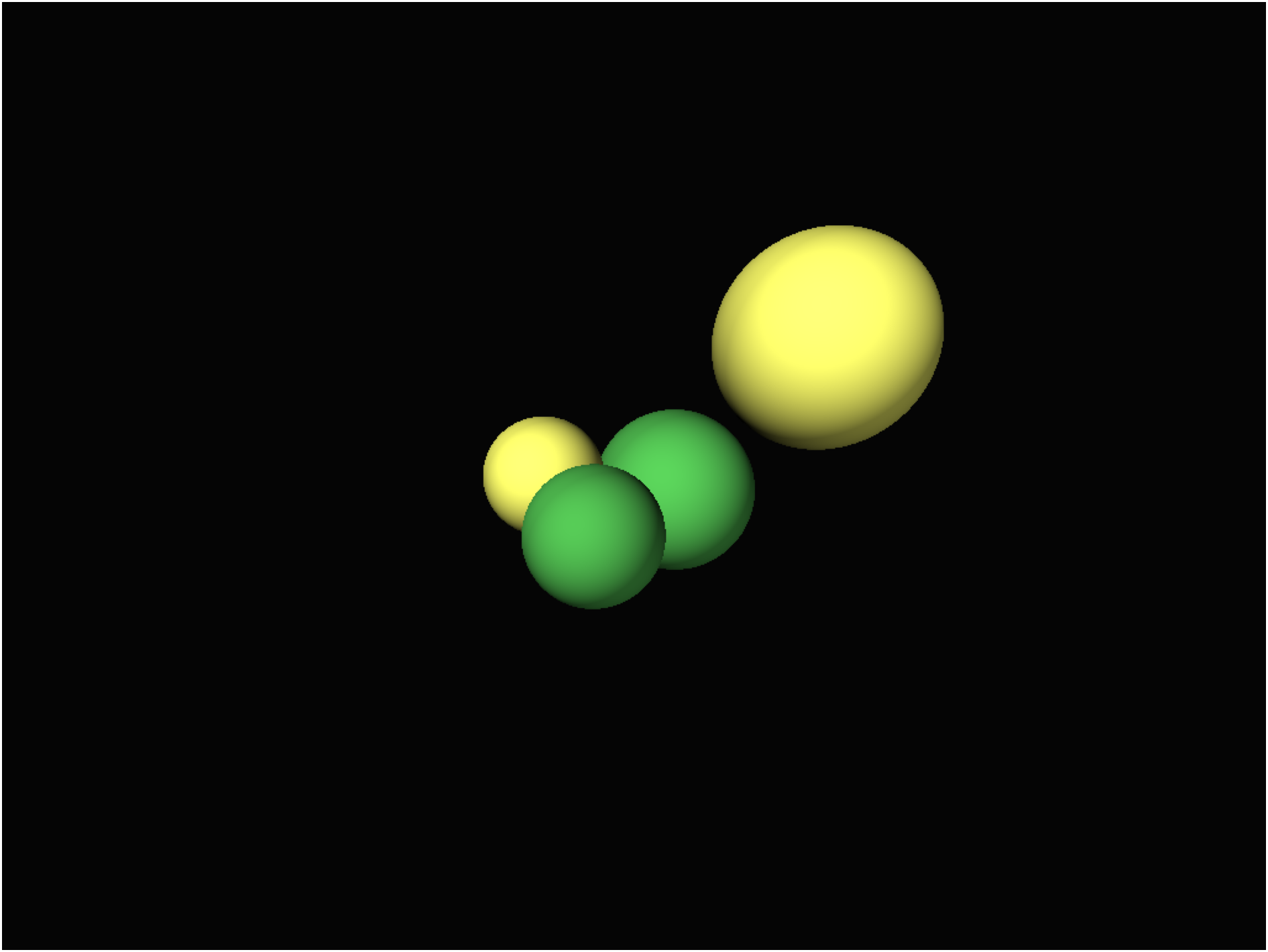
Step 4: Add lighting
This section corresponds to the Step 4 of the C++ tutorial. Please read that section for an explanation of the trick used to estimate the light intensity of pixel based on the angle of intersection between each ray and the spheres. The changes are minimal and are primarily about handling this intersection angle.
@value
@register_passable("trivial")
struct Light(CollectionElement):
var position: Vec3f
var intensity: Float32
@value
@register_passable("trivial")
struct Light(CollectionElement):
var position: Vec3f
var intensity: Float32
fn scene_intersect(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
mut material: Material,
mut hit: Vec3f,
mut N: Vec3f,
) -> Bool:
var spheres_dist = inf[DType.float32]()
for i in range(0, spheres.size):
var dist: Float32 = 0
if spheres[i].intersects(orig, dir, dist) and dist < spheres_dist:
spheres_dist = dist
hit = orig + dir * dist
N = (hit - spheres[i].center).normalize()
material = spheres[i].material
return (spheres_dist != inf[DType.float32]())
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
return bg_color
var diffuse_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
return material.color * diffuse_light_intensity
fn create_image_with_spheres_and_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights).color
)
parallelize[_process_row](height)
return image
var lights = List[Light]()
lights.append(Light(Vec3f(-20, 20, 20), 1.0))
lights.append(Light(Vec3f(20, -20, 20), 0.5))
render(create_image_with_spheres_and_lights(spheres, lights, H, W))
fn scene_intersect(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
mut material: Material,
mut hit: Vec3f,
mut N: Vec3f,
) -> Bool:
var spheres_dist = inf[DType.float32]()
for i in range(0, spheres.size):
var dist: Float32 = 0
if spheres[i].intersects(orig, dir, dist) and dist < spheres_dist:
spheres_dist = dist
hit = orig + dir * dist
N = (hit - spheres[i].center).normalize()
material = spheres[i].material
return (spheres_dist != inf[DType.float32]())
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
return bg_color
var diffuse_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
return material.color * diffuse_light_intensity
fn create_image_with_spheres_and_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights).color
)
parallelize[_process_row](height)
return image
var lights = List[Light]()
lights.append(Light(Vec3f(-20, 20, 20), 1.0))
lights.append(Light(Vec3f(20, -20, 20), 0.5))
render(create_image_with_spheres_and_lights(spheres, lights, H, W))
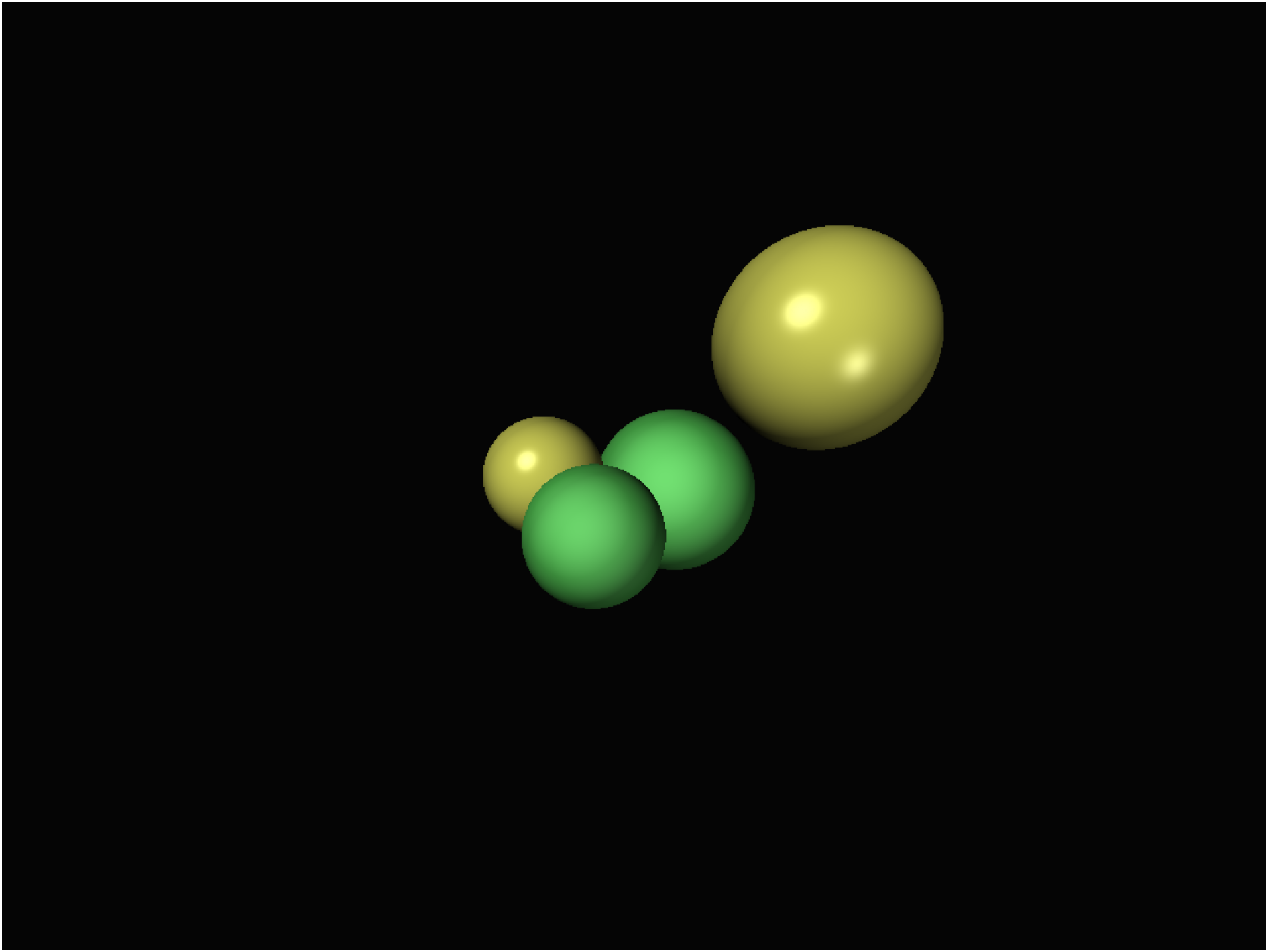
Step 5: Add specular lighting
This section corresponds to the Step 5 of the C++ tutorial. The changes to the code are quite minimal, but the rendered picture looks much more realistic!
fn reflect(I: Vec3f, N: Vec3f) -> Vec3f:
return I - N * (I @ N) * 2.0
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
return bg_color
var diffuse_light_intensity: Float32 = 0
var specular_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
specular_light_intensity += (
pow(
max(-reflect(-light_dir, N) @ dir, 0.0),
material.specular_component,
)
* lights[i].intensity
)
var result = material.color * diffuse_light_intensity * material.albedo.data[
0
] + Vec3f(
1.0, 1.0, 1.0
) * specular_light_intensity * material.albedo.data[
1
]
var result_max = max(result[0], max(result[1], result[2]))
# Cap the resulting vector
if result_max > 1:
return result * (1.0 / result_max)
return result
fn create_image_with_spheres_and_specular_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights).color
)
parallelize[_process_row](height)
return image
render(create_image_with_spheres_and_specular_lights(spheres, lights, H, W))
fn reflect(I: Vec3f, N: Vec3f) -> Vec3f:
return I - N * (I @ N) * 2.0
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
return bg_color
var diffuse_light_intensity: Float32 = 0
var specular_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
specular_light_intensity += (
pow(
max(-reflect(-light_dir, N) @ dir, 0.0),
material.specular_component,
)
* lights[i].intensity
)
var result = material.color * diffuse_light_intensity * material.albedo.data[
0
] + Vec3f(
1.0, 1.0, 1.0
) * specular_light_intensity * material.albedo.data[
1
]
var result_max = max(result[0], max(result[1], result[2]))
# Cap the resulting vector
if result_max > 1:
return result * (1.0 / result_max)
return result
fn create_image_with_spheres_and_specular_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights).color
)
parallelize[_process_row](height)
return image
render(create_image_with_spheres_and_specular_lights(spheres, lights, H, W))
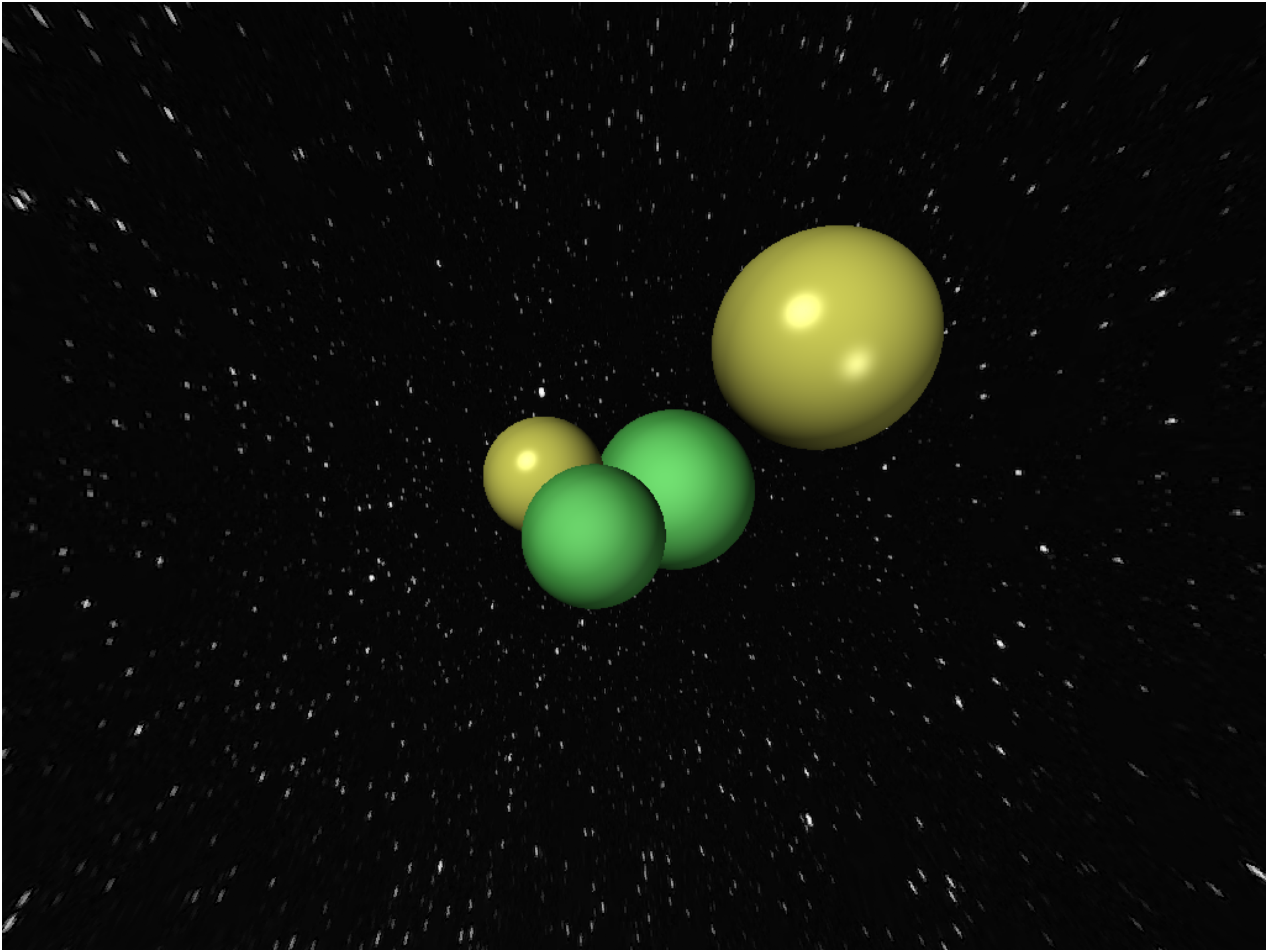
Step 6: Add background
As a last step, let's use an image for the background instead of a uniform
fill. The only code that we need to change is the code where we used to return
bg_color. Now we will determine a point in the background image to which the
ray is directed and draw that.
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
bg: Image,
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
# Background
# Given a direction vector `dir` we need to find a pixel in the image
var x = dir[0]
var y = dir[1]
# Now map x from [-1,1] to [0,w-1] and do the same for y.
var w = bg.width
var h = bg.height
var col = Int((1.0 + x) * 0.5 * (w - 1))
var row = Int((1.0 + y) * 0.5 * (h - 1))
return Material(bg.pixels[bg._pos_to_index(row, col)])
var diffuse_light_intensity: Float32 = 0
var specular_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
specular_light_intensity += (
pow(
max(-reflect(-light_dir, N) @ dir, 0.0),
material.specular_component,
)
* lights[i].intensity
)
var result = material.color * diffuse_light_intensity * material.albedo.data[
0
] + Vec3f(
1.0, 1.0, 1.0
) * specular_light_intensity * material.albedo.data[
1
]
var result_max = max(result[0], max(result[1], result[2]))
# Cap the resulting vector
if result_max > 1:
return result * (1.0 / result_max)
return result
fn create_image_with_spheres_and_specular_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
bg: Image,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights, bg).color
)
parallelize[_process_row](height)
return image
var bg = load_image("images/background.png")
render(
create_image_with_spheres_and_specular_lights(spheres, lights, H, W, bg)
)
fn cast_ray(
orig: Vec3f,
dir: Vec3f,
spheres: List[Sphere],
lights: List[Light],
bg: Image,
) -> Material:
var point = Vec3f.zero()
var material = Material(Vec3f.zero())
var N = Vec3f.zero()
if not scene_intersect(orig, dir, spheres, material, point, N):
# Background
# Given a direction vector `dir` we need to find a pixel in the image
var x = dir[0]
var y = dir[1]
# Now map x from [-1,1] to [0,w-1] and do the same for y.
var w = bg.width
var h = bg.height
var col = Int((1.0 + x) * 0.5 * (w - 1))
var row = Int((1.0 + y) * 0.5 * (h - 1))
return Material(bg.pixels[bg._pos_to_index(row, col)])
var diffuse_light_intensity: Float32 = 0
var specular_light_intensity: Float32 = 0
for i in range(lights.size):
var light_dir = (lights[i].position - point).normalize()
diffuse_light_intensity += lights[i].intensity * max(light_dir @ N, 0)
specular_light_intensity += (
pow(
max(-reflect(-light_dir, N) @ dir, 0.0),
material.specular_component,
)
* lights[i].intensity
)
var result = material.color * diffuse_light_intensity * material.albedo.data[
0
] + Vec3f(
1.0, 1.0, 1.0
) * specular_light_intensity * material.albedo.data[
1
]
var result_max = max(result[0], max(result[1], result[2]))
# Cap the resulting vector
if result_max > 1:
return result * (1.0 / result_max)
return result
fn create_image_with_spheres_and_specular_lights(
spheres: List[Sphere],
lights: List[Light],
height: Int,
width: Int,
bg: Image,
) -> Image:
var image = Image(height, width)
@parameter
fn _process_row(row: Int):
var y = -((Float32(2.0) * row + 1) / height - 1)
for col in range(width):
var x = ((Float32(2.0) * col + 1) / width - 1) * width / height
var dir = Vec3f(x, y, -1).normalize()
image.set(
row, col, cast_ray(Vec3f.zero(), dir, spheres, lights, bg).color
)
parallelize[_process_row](height)
return image
var bg = load_image("images/background.png")
render(
create_image_with_spheres_and_specular_lights(spheres, lights, H, W, bg)
)
Next steps
We've only explored the basics of ray tracing here, but you can add shadows, reflections and so much more! Fortunately these are explained in the C++ tutorial, and we leave the corresponding Mojo implementations as an exercise for you.

Was this page helpful?
Thank you! We'll create more content like this.
Thank you for helping us improve!